
หุ่นยนต์ - วิกิพีเดีย
หุ่นยนต์ คือเครื่องยนต์ชนิดหนึ่งที่มีลักษณะโครงสร้างและรูปร่างแตกต่างกันไปตามวัตถุประสงค์ หุ่นยนต์ในแต่ละประเภทจะมีหน้าที่การทำงานในด้านต่าง ๆ ตามการควบคุมโดยตรงของมนุษย์ หรืออาจมีการตั้งค่าให้หุ่นยนต์สามารถตัดสินใจได้เองในระดับใดระดับหนึ่ง การควบคุมระบบต่าง ๆ ในการสั่งงานระหว่างหุ่นยนต์และมนุษย์ สามารถทำได้โดยทางอ้อมและอัตโนมัติ โดยทั่วไปหุ่นยนต์ถูกสร้างขึ้นเพื่อสำหรับงานที่มีความยากลำบากหรืออันตรายเช่น งานสำรวจในพื้นที่บริเวณแคบ งานสำรวจในบริเวณที่เกิดภัยพิบัติ หรืองานสำรวจบนผิวของดวงจันทร์หรือดาวเคราะห์ต่าง ๆ ปัจจุบันเทคโนโลยีของหุ่นยนต์เจริญก้าวหน้าอย่างรวดเร็ว หุ่นยนต์เริ่มเข้ามามีบทบาทกับชีวิตของมนุษย์ในหลากหลายด้าน เช่น ด้านอุตสาหกรรมการผลิต ด้านการแพทย์ ด้านงานสำรวจทั้งในโลกเราและงานสำรวจในอวกาศ หรือด้านการบันเทิง เช่นหุ่นยนต์ที่ถูกสร้างขึ้นเพื่อเป็นเครื่องเล่นของมนุษย์ ปัจจุบันนี้ได้มีการพัฒนาให้หุ่นยนต์นั้นมีลักษณะที่คล้ายมนุษย์มากขึ้นเพื่อผลทางจิตวิทยาในการอาศัยอยู่ร่วมกันกับมนุษย์ในชีวิตประจำวัน
หุ่นยนต์อาจถูกแบ่งออกเป็น 2 ประเภทตามลักษณะการใช้งาน คือ 1.หุ่นยนต์ชนิดที่ติดตั้งอยู่กับที่ (fixed robot) เป็นหุ่นยนต์ที่ไม่สามารถเคลื่อนที่ไปไหนได้ด้วยตัวเอง มีลักษณะเป็นแขนกล สามารถขยับและเคลื่อนไหวได้เฉพาะแต่ละข้อต่อ ภายในตัวเองเท่านั้น มักนำไปใช้ในโรงงานอุตสาหกรรม เช่นโรงงานประกอบรถยนต์ 2. หุ่นยนต์ชนิดที่เคลื่อนที่ได้ (mobile robot) หุ่นยนต์ประเภทนี้จะแตกต่างจากหุ่นยนต์ที่ติดตั้งอยู่กับที่ เพราะสามารเคลื่อนที่ไปไหนมาไหนได้ด้วยตัวเอง โดยการใช้ล้อหรือการใช้ขา ซึ่งหุ่นยนต์ประเภทนี้ปัจจุบันยังเป็นงานวิจัยที่ทำการศึกษาอยู่ภายในห้องทดลอง เพื่อพัฒนาออกมาใช้งานในรูปแบบต่าง ๆ เช่นหุ่นยนต์สำรวจดาวอังคาร ขององค์การนาซ่า
ปัจจุบันมีการพัฒนาหุ่นยนต์ให้มีลักษณะเป็นสัตว์เลี้ยงอย่างสุนัข เพื่อให้มาเป็นเพื่อนเล่นกับมนุษย์ เช่น หุ่นยนต์ IBO ของบริษัทโซนี่ หรือแม้กระทั่งมีการพัฒนาหุ่นยนต์ให้สามารถเคลื่อนที่แบบสองขาได้อย่างมนุษย์ เพื่ออนาคตจะสามารถนำไปใช้ในงานที่มีความเสี่ยงต่ออันตรายแทนมนุษย์ ในประเทศไทย สถานศึกษาในระดับอุดมศึกษาหลายแห่งหรือองค์กรของภาครัฐ และเอกชน ได้เล็งเห็นถึงประโยนช์ของเทคโนโลยีหุ่นยนต์ และร่วมเป็นแรงผลักดันให้เยาว์ชนในชาติ พัฒนาองค์ความรู้ เพื่อให้ก้าวทันเทคโนโลยีของประเทศที่พัฒนาแล้ว โดยการจัดให้มีการแข่งขันหุ่นยนต์ขึ้นในประเทศไทยหลายรายการ เพื่อให้นักศึกษาได้สามารถ นำความรู้ที่เรียนมาประยุกต์ใช้งานได้ เป็นการเสริมสร้างและพัฒนาทักษะ เพื่อนำความรู้ไปพัฒนาประเทศในอนาคต
• แอนดรอยด์ (Android) เป็นการเรียกหุ่นยนต์คล้ายมนุษย์ที่สามารถแสดงออกเหมือนมนุษย์ แม้ว่ารากศัพท์ภาษากรีกของคำนี้หมายถึงเพศชาย แต่การใช้ในบริบทภาษาอังกฤษมักไม่ได้มีความหมายเจาะจงว่าเป็นเพศใดจีนอยส์ (Gynoid) เป็นการเรียกหุ่นยนต์คล้ายมนุษย์เพศหญิง
• แอ็คทรอยด์ (Actriod) เป็นหุ่นยนต์ที่เลียนแบบพฤติกรรมมนุษย์ เช่น กะพริบตา หายใจ เริ่มพัฒนาโดย มหาวิทยาลัยโอซาก้าและบริษัทโคโคโระ
• ไซบอร์ก (Cyborg) เป็นหุ่นยนต์ที่เชื่อมต่อกับสิ่งมีชีวิต หรือ ครื่งคนครึ่งหุ่น เริ่มปรากฏครั้งแรกในเรื่องแต่งปี 1960
หุ่นยนต์เริ่มเข้ามามีบทบาทกับชีวิตประจำวันของมนุษย์เรื่อยมา เทคโนโลยีที่ได้รับการพัฒนาอย่างต่อเนื่องในปัจจุบัน ทำให้ความสามารถของหุ่นยนต์พัฒนาขึ้นอย่างรวดเร็ว สามารถทำงานต่าง ๆ ที่มนุษย์ไม่สามารถทำได้จำนวนมาก ซึ่งการนำหุ่นยนต์เข้าใช้งานแทนมนุษย์นั้น ทำให้ลดบทบาทมนุษย์ให้น้อยลงสามารถแบ่งประเภทตามความสามารถของหุ่นยนต์ได้
หุ่นยนต์สามารถทำการสำรวจงานวิจัยทางด้านวิทยาศาสตร์ ร่วมกับมนุษย์ เช่น การสำรวจท้องทะเลหรือมหาสมุทรที่มีความลึกเป็นอย่างมาก หรือการสำรวจบริเวณปากปล่องภูเขาไฟเพื่อเก็บบันทึกข้อมูลการเปลี่ยนแปลงต่าง ๆ ซึ่งเป็นงานเสี่ยงอันตรายที่เกินขอบเขตความสามารถของมนุษย์ที่ไม่สามารถปฏิบัติงานสำรวจเช่นนี้ได้ ทำให้ปัจจุบันมีการพัฒนาหุ่นยนต์เพื่อใช้ในงานวิจัยและสำรวจ เพื่อให้หุ่นยนต์สามารถทนต่อสภาพแวดล้อมและสามารถทำการควบคุมหุ่นยนต์ได้ในระยะไกลด้วยระบบคอนโทรล โดยมีเซนเซอร์ติดตั้งที่ตัวหุ่นยนต์เพื่อใช้ในการวัดระยะทางและเก็บข้อมูลในส่วนต่าง ๆ ทางด้านวิทยาศาสตร์
ในงานด้านการแพทย์ เริ่มนำเอาหุ่นยนต์แขนกลเข้ามามีส่วนร่วมในการช่วยทำการผ่าตัดคนไข้ เนื่องจากหุ่นยนต์นั้นสามารถทำงานในด้านที่มีความละเอียดสูงที่เกินกว่ามนุษย์จะทำได้ เช่น การนำเอาหุ่นยนต์มาใช้งานด้านการผ่าตัดสมอง ซึ่งมีความจำเป็นอย่างมากที่ต้องการความละเอียดในการผ่าตัด หุ่นยนต์แขนกลจึงกลายเป็นส่วนหนึ่งของการผ่าตัดในด้านการแพทย์ การทำงานของหุ่นยนต์แขนกลในการผ่าตัด จะเป็นลักษณะการทำงานของการควบคุมการผ่าตัดโดยผ่านทางแพทย์ผู้ทำการผ่าตัดอีกที ซึ่งการผ่าตัดโดยมีหุ่นยนต์แขนกลเข้ามามีส่วนร่วมนั้นจะเน้นเรื่องความปลอดภัยเป็นอย่างสูง รวมทั้งความสามารถในการเคลื่อนที่ของหุ่นยนต์ รวมถึงงานเภสัชกรรมที่มีบางโรงพยาบาลนำหุ่นยนต์มาใช้ในการจ่ายยา [1]
หุ่นยนต์สามารถทำการสำรวจงานวิจัยทางด้านวิทยาศาสตร์ ร่วมกับมนุษย์ เช่น การสำรวจท้องทะเลหรือมหาสมุทรที่มีความลึกเป็นอย่างมาก หรือการสำรวจบริเวณปากปล่องภูเขาไฟเพื่อเก็บบันทึกข้อมูลการเปลี่ยนแปลงต่าง ๆ ซึ่งเป็นงานเสี่ยงอันตรายที่เกินขอบเขตความสามารถของมนุษย์ที่ไม่สามารถปฏิบัติงานสำรวจเช่นนี้ได้ ทำให้ปัจจุบันมีการพัฒนาหุ่นยนต์เพื่อใช้ในงานวิจัยและสำรวจ เพื่อให้หุ่นยนต์สามารถทนต่อสภาพแวดล้อมและสามารถทำการควบคุมหุ่นยนต์ได้ในระยะไกลด้วยระบบคอนโทรล โดยมีเซนเซอร์ติดตั้งที่ตัวหุ่นยนต์เพื่อใช้ในการวัดระยะทางและเก็บข้อมูลในส่วนต่าง ๆ ทางด้านวิทยาศาสตร์
หุ่นยนต์เริ่มมีบทบาททางด้านเทคโนโลยีอุตสาหกรรมในขณะที่งานด้านอุตสาหกรรม มีความต้องการด้านแรงงานเป็นอย่างมาก การจ้างแรงงานจำนวนมากเพื่อใช้ในงานอุตสาหกรรม ทำให้ต้นทุนการผลิตของแต่ละโรงงานอุตสาหกรรม เพิ่มจำนวนสูงขึ้น และงานอุตสาหกรรมบางงานไม่สามารถที่จะใช้แรงงงานเข้าไปทำได้ ซึ่งบางงานนั้นอันตรายและมีความเสี่ยงเป็นอย่างมาก หรือเป็นงานที่ต้องการความรวดเร็วและแม่นยำในการผลิตรวมทั้งเป็นการประหยัดระยะเวลา ทำให้หุ่นยนต์กลายเป็นทางออกของงานด้านอุตสาหกรรม
อาจจะสร้างเครื่องบินสอดแนมผู้ก่อการร้าย โดยติดตั้งเรดาร์คอยตรวจจับเหตุที่อาจไม่ชอบมาพากล และยังสามารถใช้เป็นตัวทดลองประสิทธิภาพของอาวุธได้
หุ่นยนต์ประเภทนี้ได้รับการพัฒนาให้สามารถตอบโต้กับคนได้เสมือนเป็นเพื่อน เล่นหรือสัตว์เลี้ยง ซึ่งมีในรูปแบบของสุนัข แมว และแมลง เป็นต้น หรือกระทั่งสร้างความบันเทิงทางเพศให้กับมนุษย์ได้อีกด้วย
ปัจจุบันมีหุ่นยนต์ที่ใช้ในการแข่งขันต่าง ๆ เช่น ด้านกีฬาอาจเป็นหุ่นยนต์ฟุตบอล โดรน ด้านดนตรีเช่นหุ่นยนต์นักเต้นเป็นต้น
หุ่นยนต์เป็นจินตนาการของมนุษย์ที่ถ่ายทอดผ่านเรื่องแต่งต่าง ๆ ซึ่งปรากฏใน นิยายวิทยาศาสตร์ การ์ตูน และ ภาพยนตร์ และเป็นที่รู้จักอย่างแพร่หลาย เช่น เจ้าหนูอะตอม (Astro Boy) โดราเอมอน (Doraemon) กันดั้ม (Gundum) โรโบคอบ (RoboCop)
รู้จัก 5 ประเภทหุ่นยนต์พื้นฐานในอุตสาหกรรม (Industrial Robot) และการใช้งาน
หุ่นยนต์อุตสาหกรรม หรือ “Industrial robot” เป็น เครื่องทุ่นแรงในการผลิตของโรงงานอุตสาหกรรมที่ปัจจุบันมีการนำมาใช้กันอย่างแพร่หลาย และค่อยๆพัฒนาให้สามารถทำงานได้หลากหลายฟังก์ชั่น มีทั้งขนาดเล็กและขนาดใหญ่โดยแบ่งตามลักษณะประเภทการใช้งาน ซึ่งควบคุมด้วยมนุษย์และระบบอัตโนมัติ ในภาคอุตสาหกรรมของประเทศไทยมีการนำเทคโนโลยีและระบบอัตโนมัติ เข้ามาใช้ในการผลิตสินค้ามากขึ้นเพื่อเพิ่มคุณภาพและมาตรฐานสินค้า ให้สามารถแข่งขันกับตลาดโลกได้ จะเห็นว่าหุ่นยนต์อุตสาหกรรมที่ผลิตขึ้นมานั้นนำไปใช้ในอุตสาหกรรมที่หลากหลายมาก ซึ่งจะต้องเข้าใจในที่นี้ว่า หุ่นยนต์อุตสาหกรรม ตามความหมายของสถาบันหุ่นยนต์อเมริกา (The Robotics Institute of America) ได้ให้ความหมายของหุ่นยนต์ว่า “หุ่นยนต์ คือ เครื่องจักรที่ถูกออกแบบให้สามารถทำงานได้หลากหลายหน้าที่เพื่อใช้ เคลื่อนย้ายวัสดุ ชิ้นงาน เครื่องมือ หรืออุปกรณ์พิเศษ ผ่านโปรแกรมควบคุมการเคลื่อนที่ต่างๆ สำหรับงานต่างๆ ที่หลากหลายอย่างมีประสิทธิภาพ” หรือ “หุ่นยนต์ คือ เครื่องจักรกลทุกชนิดที่ออกแบบมาให้สามารถทำงานแทนมนุษย์ได้ทุกประเภทที่มนุษย์ไม่สามารถปฏิบัติงานได้ และเป็นการทำงานอัตโนมัติ สามารถทำงานในรูปแบบที่ซับซ้อนและมีความยึดหยุ่น” ข้อดีของการใช้หุ่นยนต์มาทำงานเพื่อให้มีประสิทธิภาพ มีดังนี้ ภาพแสดง รูปการทำงานของหุ่นยนต์เมื่อเทียบกับแขนมนุษย์

ที่มา :
ในอุตสาหกรรมการผลิต หุ่นยนต์อุตสาหกรรมมีบทบาทในการช่วยงานร่วมกับมนุษย์อยู่มาก โดยแต่ละอุตสาหกรรม ก็จะมีหุ่นยนต์แต่ละประเภทแตกต่างกันออกไป ไม่ว่าจะเป็นหุ่นยนต์ที่มีขนาดใหญ่ ไปจนถึงหุ่นยนต์ขนาดจิ๋ว ซึ่งโดยทั่วไป เราสามารถแบ่งประเภทของหุ่นยนต์ตามการใช้งานได้ 5 ประเภท ดังนี้
Cartesian เป็นหุ่นยนต์ที่แกนทั้ง 3 ของหุ่นยนต์จะเคลื่อนที่เป็นเส้นตรง มีความแข็งแรง และมีประสิทธิภาพในการรับน้ำหนักสูงสุด เมื่อเปรียบเทียบกับหุ่นยนต์ประเภทอื่น ถ้าโครงสร้างมีลักษณะคล้าย Overhead Crane จะเรียกว่าเป็นหุ่นยนต์ชนิด Gantry แต่ถ้าหุ่นยนต์ไม่มีขาตั้งหรือขาเป็นแบบอื่น เรียกว่า ชนิด Cartesian นิยมใช้ในการหยิบจับเพื่อทำการประกอบ เช่น การประกอบชิ้นส่วนอิเล็กทรอนิกส์ หรือติดชิ้นส่วนยานยนต์ด้วยสารเคมี เนื่องจากโครงสร้างมีความแข็งแรงตลอดแนวการเคลื่อนที่ ดังนั้นจึงเหมาะกับงานเคลื่อนย้ายของหนัก ๆ หรือเรียกว่างาน Pick-and-Place เช่นใช้โหลดชิ้นงานเข้าเครื่องจักร (Machine loading) ,ใช้จัดเก็บชิ้นงาน (Stacking) นอกจากนี้ยังสามารถใช้ในงานประกอบ (Assembly) ที่ไม่ต้องการเข้าถึงในลักษณะที่มีมุมหมุน เช่น ประกอบอุปกรณ์อิเล็กทรอนิกส์ และงาน Test ต่าง ๆ
Cylindrical หุ่นยนต์ที่มีลักษณะการเคลื่อนไหวคล้าย Cartesian แต่มีความแตกต่างกันอยู่ที่ตัวฐานของหุ่นจะเป็นการหมุนรอบแกน แทนการเคลื่อนที่แบบเคลื่อนเข้าเลื่อนออก โดยทั่วไป Cylindrical Robot ใช้ในการหยิบยกชิ้นงาน (Pick-and-Place) ขนย้ายสิ่งของ งานเชื่อม รวมถึงงานประกอบต่าง ๆ ที่เป็นงานที่มีความซับซ้อนต่ำ เน้นการทำงานที่รวดเร็ว เพราะสามารถเคลื่อนที่เข้าออกบริเวณที่เป็นช่องโพรงเล็ก ๆ ได้สะดวก
SCARA หรือ Selective Compliance Assembly Robot Arm เป็นหุ่นยนต์ที่มีการเคลื่อนที่แบบหมุน 2 จุด โดยหุ่นยนต์ SCARA จะสามารถเคลื่อนที่ได้รวดเร็วในแนวระนาบ และมีความแม่นยำสูง จึงเหมาะกับงานประกอบชิ้นส่วนทางอิเล็กทรอนิกส์ ที่ไม่ต้องการความรวดเร็วในการหมุนมากนัก แต่จะไม่เหมาะกับงานประกอบชิ้นส่วนทางกล (Mechanical Part) งานตรวจสอบ (Inspection) และงานบรรจุภัณฑ์ (Packaging)
Polar หรือที่เรียกว่า Spherical Robot คือหุ่นยนต์ที่มีแนวการเคลื่อนที่เป็นการหมุนสองจุด คือส่วนฐานและส่วนไหล่ของหุ่นยนต์ และส่วนมือจับสามารถยืดหดได้ หุ่นยนต์ประเภทนี้สามารถทำงานประเภทหยิบจับชิ้นงาน รวมถึงงานเชื่อมรูปแบบต่าง ๆ ได้ดี เหมาะกับการใช้ในงานที่มีการเคลื่อนที่ในแนวตั้ง (Vertical) เพียงเล็กน้อย เช่น การโหลดชิ้นงานเข้าออกจากเครื่องปั้ม (Press) หรืออาจจะใช้งานเชื่อมจุด (Spot Welding)
Articulated (Jointed Arm) ทุกแกนการเคลื่อนที่จะเป็นแบบหมุน (Revolute) รูปแบบการเคลื่อนที่จะคล้ายกับแขนคน ซึ่งจะประกอบด้วยช่วงเอว ท่อนแขนบน ท่อนแขนล่าง ข้อมือ การเคลื่อนที่ทำให้ได้พื้นที่การทำงาน หุ่นยนต์ชนิดนี้สามารถใช้งานได้กว้างขวางเพราะสามารถเข้าถึงตำแหน่งต่างๆ ได้ดี เช่น งานเชื่อม Spot Welding, Path Welding, งานยกของ, งานตัด, งานทากาว, งานที่มีการเคลื่อนที่ยากๆ เช่น งานพ่นสี งาน Sealing เป็นต้น
ความหมาย ประวัติ และวิวัฒนาการของหุ่นยนต์
สารานุกรมไทยสำหรับเยาวชนฯ / เล่มที่ ๓๖ / เรื่องที่ ๖ หุ่นยนต์ / ความหมาย ประวัติ และวิวัฒนาการของหุ่นยนต์ ความหมาย ประวัติ และวิวัฒนาการของหุ่นยนต์ ความหมาย ประวัติ และวิวัฒนาการของหุ่นยนต์
หุ่นยนต์ (robot) คือ เครื่องจักรกลหรือหุ่นที่มีเครื่องกลไกอยู่ภายใน สามารถทำงานได้หลายอย่างร่วมกับมนุษย์ หรือทำงานแทนมนุษย์ และสามารถจัดลำดับแผนการทำงานก่อนหรือหลังได้
ระดับขั้นการทำงานของหุ่นยนต์สามารถจำแนกได้ ๖ ระดับ ตามเกณฑ์มาตรฐาน ของสมาคมหุ่นยนต์อุตสาหกรรม แห่งญี่ปุ่น (Japanese Industrial Robot Association: JIRA) ดังนี้
ระดับที่ ๑ กลไกที่ถูกควบคุมด้วยมนุษย์ (manual-handling device)
ระดับที่ ๒ หุ่นยนต์ที่ทำงานตามแผนล่วงหน้าที่กำหนดไว้ โดยไม่สามารถปรับเปลี่ยนแผนงานได้ (fixed-sequence robot)
ระดับที่ ๓ หุ่นยนต์ที่ทำงานตามแผนล่วงหน้าที่กำหนดไว้ โดยสามารถปรับเปลี่ยนแผนงานได้ (variable-sequence robot)
ระดับที่ ๔ ผู้ควบคุมเป็นผู้สอนงานให้แก่หุ่นยนต์ หุ่นยนต์จะทำงานเล่นย้อนกลับ ตามที่หน่วยความจำบันทึกไว้ (playback robot)
ระดับที่ ๕ ผู้ควบคุมบันทึกข้อมูลเชิงตัวเลขการเคลื่อนที่ให้แก่หุ่นยนต์ และหุ่นยนต์สามารถทำงานได้เอง โดยไม่ต้องมีการสอนงาน (numerical control robot)
ระดับที่ ๖ หุ่นยนต์มีความฉลาด สามารถเรียนรู้สภาพแวดล้อม และตัดสินใจทำงานได้ด้วยตัวเอง (intelligent robot)
สำหรับสถาบันหุ่นยนต์แห่งสหรัฐอเมริกา (The Robotics Institute of America: RIA) จะพิจารณาเพียงระดับที่ ๓-๖ เท่านั้น จึงถือว่า เป็นหุ่นยนต์
หุ่นยนต์สามารถจำแนกเป็น ๒ ประเภทใหญ่ๆ ตามลักษณะการใช้งาน คือ
๑. หุ่นยนต์ชนิดติดตั้งอยู่กับที่ (fixed robot) หุ่นยนต์ประเภทนี้มีลักษณะเป็นแขนกล ซึ่งสามารถขยับ และเคลื่อนไหวได้เฉพาะข้อต่อ นิยมใช้ในโรงงานอุตสาหกรรม
๒. หุ่นยนต์ชนิดเคลื่อนที่ได้ (mobile robot) หุ่นยนต์ประเภทนี้สามารถเคลื่อนที่ไปได้ด้วยตัวเอง โดยการใช้ล้อ ขา หรือการขับเคลื่อนในรูปแบบอื่นๆ
คาเรล คาเปก ผู้ที่ทำให้คำว่า "โรบอต" เป็นที่รู้จักกันทั่วโลก หุ่นยนต์มาจากคำว่า “โรบอต” (robot หรือ robota) ในภาษาเช็ก ซึ่งแปลว่า ทาส หรือผู้ถูกบังคับใช้แรงงาน โดยใน พ.ศ. ๒๔๖๔ คาเรล คาเปก (Karel Capek) นักประพันธ์ชาวเช็ก ได้ประพันธ์ละครเวทีเรื่อง “อาร์.ยู.อาร์.” (Rossum’s Universal Robots: R.U.R.) มีเนื้อหาเกี่ยวกับมนุษย์ต้องการทาสรับใช้ จึงสร้างหุ่นยนต์มาช่วยทำงาน ต่อมาหุ่นยนต์ได้พัฒนาตัวเองให้มีความฉลาดมากขึ้น จึงเกิดความคิดต่อต้านมนุษย์และไม่ยอมให้กดขี่ข่มเหงอีกต่อไป ละครเรื่องนี้โด่งดังมาก จนทำให้คำว่า “โรบอต” เป็นที่รู้จักไปทั่วโลก
ต่อมา ใน พ.ศ. ๒๔๘๕ ไอแซก อะซิมอฟ (Isaac Asimov) นักวิทยาศาสตร์และนักประพันธ์ชาวอเมริกัน เชื้อสายรัสเซีย ได้ประพันธ์นวนิยายเชิงวิทยาศาสตร์ เรื่อง “รันอะราวนด์” (Run around) ซึ่งมีเนื้อหาเกี่ยวกับเรื่องหุ่นยนต์ ในผลงานการประพันธ์ดังกล่าวกำหนดกฎ ๓ ข้อของหุ่นยนต์ขึ้น ประกอบด้วย
๑. หุ่นยนต์ห้ามทำร้ายมนุษย์ หรือนิ่งเฉยปล่อยให้มนุษย์ตกอยู่ในอันตราย
๒. หุ่นยนต์ต้องเชื่อฟังคำสั่งมนุษย์ ยกเว้นคำสั่งนั้นขัดแย้งกับกฎข้อแรก
๓. หุ่นยนต์ปกป้องตัวเองได้ แต่ต้องไม่ขัดกับกฎข้อแรกหรือกฎข้อที่ ๒
หลังจากบทประพันธ์ของอะซิมอฟเผยแพร่ออกไป กฎ ๓ ข้อนี้ก็ได้รับการสนับสนุนจากคนเป็นจำนวนมาก เนื่องจาก เป็นกฎที่มีความถูกต้อง และตั้งอยู่บนพื้นฐานของความปลอดภัยในการดำรงชีวิตร่วมกันระหว่างมนุษย์กับหุ่นยนต์ ผลจากนวนิยายเรื่องนี้ ทำให้นักวิทยาศาสตร์สนใจหุ่นยนต์มากขึ้น และเริ่มต้นพัฒนาหุ่นยนต์อย่างจริงจังนับตั้งแต่นั้นเป็นต้นมา
หุ่นยนต์มีเรื่องราวมายาวนานตั้งแต่สมัยโบราณ แต่ส่วนใหญ่จะอยู่ในเรื่องเล่าของตำนานปรัมปรา เช่น ในสมัยของกรีกโบราณ มีตำนานของ ทาลอส (Talos) เป็นหุ่นยนต์ทหารยามผู้พิทักษ์เกาะครีต ทำหน้าที่ป้องกันการบุกรุกของศัตรู และขัดขวาง ไม่ให้พลเมืองออกจากเกาะโดยมิได้รับราชานุญาตจากกษัตริย์ไมนอส ในตำนานกล่าวว่า ทาลอสคือ รูปปั้นทองเหลือง ที่ถูกราดด้วยน้ำศักดิ์สิทธิ์ จึงสามารถเคลื่อนไหวได้ แม้ว่าจะไม่ได้กล่าวถึงกลไกขับเคลื่อน แต่ก็เป็นภาพลักษณ์ต้นแบบของหุ่นยนต์ จนถึงปัจจุบัน
มนุษย์ได้มีการประดิษฐ์อุปกรณ์ที่เคลื่อนไหวได้มานานมากแล้ว โดยในสมัยโบราณชาวกรีกจะเรียกว่า ออโตมาตา (automata) ซึ่งเป็นที่มาของคำว่า “อัตโนมัติ” (autonomous) ในปัจจุบัน ออโตมาตาชิ้นแรกของโลกเท่าที่มีหลักฐานบันทึกไว้ประดิษฐ์ขึ้น เมื่อประมาณ ๔๐๐ ปีก่อนคริสตกาล (พ.ศ. ๑๔๓) โดยอาร์คายทาส (Archytas of Tarentum) นักคณิตศาสตร์และนักประดิษฐ์ ชาวกรีก ได้ประดิษฐ์นกพิราบกล (Pigeon) ที่บินและขยับปีกขึ้นลงได้ โดยอาศัยแรงขับเคลื่อนจากไอน้ำ
ออโตมาตาที่ทำงานครบสมบูรณ์รุ่นแรกเกิดขึ้นเมื่อประมาณ ๒๕๐ ปีก่อนคริสตกาล (พ.ศ. ๒๙๓) โดยทซิบิอุส (Ctesibius of Alexandria) นักคณิตศาสตร์และนักประดิษฐ์ชาวกรีก ได้ประดิษฐ์นาฬิกาน้ำที่เรียกว่า เครปไซดรา (Clepsydra) ซึ่งบอกเวลาโดยระดับน้ำ และใช้หลักการของกาลักน้ำอยู่ตลอดเวลา ทำให้นาฬิกาน้ำสามารถทำงานได้ใหม่โดยอัตโนมัติ
ในช่วง พ.ศ. ๕๔๓-พ.ศ. ๖๔๓ เฮรอน (Heron of Alexandria) นักคณิตศาสตร์และนักประดิษฐ์ชาวกรีก ได้สร้างอุปกรณ์ขึ้นมามากมาย หนึ่งในนั้นคือ อุปกรณ์ที่ขับเคลื่อนด้วยไอน้ำ (Aeolipile) หรือเครื่องจักรเฮรอน ซึ่งถือเป็นเครื่องจักรไอน้ำตัวแรกของโลก
ใน พ.ศ. ๑๗๔๙ อัล-จาซารี (Al-Jazari) นักประดิษฐ์มุสลิมชาวอิรัก ได้ออกแบบเรือที่มีวงดนตรีหุ่นกลนั่งเล่นดนตรีอยู่ข้างใน ๔ ตัว เพื่อถวายความบันเทิงแก่แขกของเชื้อพระวงศ์ โดยการขับเคลื่อนของหุ่นกลนั้นใช้พลังงานจากน้ำ และสามารถปรับเปลี่ยนจังหวะการทำงานของหุ่นตีกลอง เป็นเสียงดนตรีได้หลายจังหวะ โดยการย้ายหมุด ไปยังตำแหน่งที่แตกต่างกัน
ใน พ.ศ. ๒๒๘๐ ชากส์ เดอ ฟูคอนซอน (Jacques de Vzucanson) นักประดิษฐ์ชาวฝรั่งเศส ได้สร้างหุ่นยนต์เป่าฟลุต (Flute Player) ที่เป่าฟลุตออกมาเป็นเพลงอย่างไพเราะได้ถึง ๑๒ เพลง โดยมีการขยับนิ้วมือที่ทำด้วยไม้ และมีปอดเทียม ในการขับลมมาเป็นฟลุต และในอีก ๒ ปีถัดมา ชากส์ เดอ ฟูคอนซอน ได้สร้างหุ่นยนต์เล่นแทมบูรีน (Tambourine Player) และหุ่นยนต์เป็ด (Digesting Duck) ที่มีกลไกเคลื่อนไหวกว่า ๔๐๐ ชิ้น สามารถที่จะขยับปีก แสดงท่าทางการกิน การย่อย (บดเมล็ดพันธุ์พืช) และการขับถ่ายได้ ซึ่งถือว่า เป็นหุ่นยนต์ยุคใหม่ที่สามารถทำงานได้จริงเป็นตัวแรกของโลก
หุ่นยนต์เคลื่อนที่ได้ตัวแรกของโลกเกิดขึ้นในช่วงสงครามโลกครั้งที่ ๒ (พ.ศ. ๒๔๘๒-พ.ศ.๒๔๘๘) ในรูปแบบของระเบิดบิน (flying bomb) ที่มีความฉลาด โดยอาศัยอุปกรณ์ตรวจรู้หรือเซ็นเซอร์ (sensor) เป็นตัวควบคุมการจุดระเบิด
ระเบิดบินเป็นหุ่นยนต์เคลื่อนที่ตัวแรกที่พัฒนาขึ้น ในช่วงสงครามโลกครั้งที่ ๒ ในช่วง พ.ศ. ๒๔๙๑-พ.ศ. ๒๔๙๒ วิลเลียม เกรย์ วอลเทอร์ (William Grey Walter) ชาวอเมริกัน สร้างหุ่นยนต์อัตโนมัติ ที่มีรูปร่างคล้ายเต่า เรียกว่า แมคินา สเปคูลาทริกซ์ (Machina Speculatrix) ชื่อ “เอลเมอร์” (Elmer) และ “เอลซี” (Elsie) โดยสร้างจากมอเตอร์ไฟฟ้า มีล้อ ๓ ล้อ สำหรับใช้ในการเคลื่อนที่ และมีอุปกรณ์ตรวจรู้แสง หุ่นยนต์ทั้ง ๒ ตัว มีระบบการทำงาน ที่กำหนดให้วิ่งเข้าหาแสง และมีความสามารถเคลื่อนที่หลบสิ่งกีดขวาง
วิลเลียม เกรย์ วอลเทอร์ ต่อมา ใน พ.ศ. ๒๕๐๓ มหาวิทยาลัยจอนส์ ฮอปกินส์ (Johns Hopkins University) ได้พัฒนาหุ่นยนต์ชื่อ “บีสต์” (Beast) ที่มีอุปกรณ์ตรวจรู้แสง และระบบการสะท้อนของคลื่นเสียงโซนาร์ (sonar) ช่วยในการนำทาง โดยหุ่นยนต์สามารถเคลื่อนที่ไปมาได้อย่างอิสระ และกลับมาเติมพลังงานเข้าสู่แบตเตอรี่ได้ด้วยตัวเอง
หุ่นยนต์อุตสาหกรรมตัวแรกของโลกได้ พัฒนาสร้างขึ้นใน พ.ศ. ๒๕๐๔ โดย จอร์จ ดีวอล (George Devol) และโจเซฟ เอ็นเกลเบอร์เกอร์ (Joseph Engelberger) วิศวกรชาวอเมริกัน ทั้ง ๒ คน ได้ประดิษฐ์แขนกลหุ่นยนต์ สำหรับนำมาใช้ในงานอุตสาหกรรมชื่อ “ยูนิเมต” (Unimate) และก่อตั้งบริษัทสร้างหุ่นยนต์แห่งแรกของโลกชื่อ “ยูนิเมชัน” (Unimation) ต่อมาโจเซฟได้รับสมญานามว่าเป็น (Unimation) ต่อมาโจเซฟได้รับสมญานามว่าเป็น “บิดาแห่งหุ่นยนต์ด้านอุตสาหกรรม”
ใน พ.ศ. ๒๕๐๙ “เชกกี” (Shakey) หุ่นยนต์เคลื่อนที่ตัวแรกของโลกที่มีความคิด เป็นของตัวเอง ได้รับการพัฒนาขึ้น โดยสถาบันวิจัยสแตนฟอร์ด (Stanford Research Institute: SRI) หุ่นยนต์เชกกีมีระบบคอมพิวเตอร์ ที่ใช้ในการประมวลผลภาพ (image processing) และมีอุปกรณ์ตรวจรู้เป็นเครื่องบอกนำทางในการเคลื่อนที่
หุ่นยนต์ "เชกกี" ใน พ.ศ. ๒๕๑๓ หุ่นยนต์ชื่อ “ลูโนโฮดวัน” (Lunokhod 1) ที่สร้างโดยสหภาพโซเวียต (ปัจจุบันคือ ประเทศรัสเซีย) เป็นหุ่นยนต์ที่ควบคุมจากระยะไกลตัวแรกของโลก ที่ขึ้นไปสำรวจสภาพพื้นผิวของดวงจันทร์ ตัวหุ่นยนต์ประกอบด้วยล้อทั้งหมด ๘ ล้อ มีอุปกรณ์ตรวจรู้ต่างๆ เช่น กล้องโทรทัศน์ ๔ ตัว อุปกรณ์ตรวจรู้รังสีคอสมิก(cosmic-ray) และรังสีเอกซ์ (X-ray) หุ่นยนต์ลูโนโฮดวันยังได้รับการออกแบบ ให้สามารถนำพลังงานแสงอาทิตย์มาใช้เป็นพลังงานในการขับเคลื่อนได้
หุ่นยนต์ซีทรีพีโอ (ซ้าย)
และหุ่นยนต์อาร์ทูดีทู (ขวา)
ใน พ.ศ. ๒๕๒๐ ภาพยนตร์เรื่อง สตาร์วอรส์ (Star Wars) ได้สร้างจินตนาการ ของหุ่นยนต์ที่สามารถเคลื่อนที่ได้อย่างอัตโนมัติชื่อ “อาร์ทูดีทู” (R2D2) และหุ่นยนต์ ที่คล้ายมนุษย์ชื่อ “ซีทรีพีโอ” (C3PO) ภาพยนตร์เรื่องนี้มีชื่อเสียงโด่งดังมาก จนทำให้คนรู้จัก และสนใจหุ่นยนต์มากขึ้น
แม้อีก ๒๐ ปีต่อมา หลังจากที่สหรัฐอเมริกาได้สร้างหุ่นยนต์อุตสาหกรรมตัวแรกของโลกขึ้นแล้วก็ตาม แต่หุ่นยนต์กลับมีวิวัฒนาการที่ก้าวหน้าอย่างมากในประเทศญี่ปุ่น ในช่วงที่มีการปฏิวัติอุตสาหกรรม การขยายตัวของอุตสาหกรรม ทำให้มีการใช้หุ่นยนต์กันอย่างแพร่หลาย เพื่อใช้แทนแรงงานคน และเพิ่มผลผลิต เช่น อุตสาหกรรมยานยนต์ อุตสาหกรรมเครื่องใช้ไฟฟ้า
หุ่นยนต์มักถูกนำมาใช้ในงานที่ต้องเสี่ยงอันตราย หรืองานที่ต้องการความแม่นยำและความละเอียดสูง ในช่วงแรก หุ่นยนต์ยังขาดความสามารถในการเรียนรู้ และทำงานได้อย่างจำกัดโดยต้องอาศัยการรับคำสั่งจากมนุษย์ แต่ในเวลาต่อมา ความสามารถของหุ่นยนต์กลับเพิ่มขึ้นอย่างทวีคูณ เมื่อโลกได้เข้าสู่ยุคอินเทอร์เน็ต (internet) ตั้งแต่ พ.ศ. ๒๕๓๓ เป็นต้นมา หุ่นยนต์มีความสามารถ และแข็งแกร่งมากขึ้น จากวิทยาการด้านคอมพิวเตอร์ วัสดุ และโลหะ ความรู้ที่มนุษย์สั่งสมมานาน สามารถถ่ายทอดสู่สมองกลของหุ่นยนต์ได้ ภายในเสี้ยววินาที
ใน พ.ศ. ๒๕๔๐ ความฉลาดของมนุษย์ถูกท้าทายจากปัญญาประดิษฐ์ (artificial intelligence) จากการที่ การ์รี คาสปารอฟ (Garry Kasparov) แชมป์หมากรุกโลกชาวรัสเซีย พ่ายแพ้ต่อสมองกลที่ชื่อว่า “ดีปบลู” (Deep Blue) ซึ่งพัฒนาขึ้น โดยมหาวิทยาลัยคาร์เนกีเมลลอน (Carnegie Mellon University) และบริษัทไอบีเอ็ม สมองกลรุ่นใหม่นี้ ทำให้หุ่นยนต์มีการทำงานที่รวดเร็วมากขึ้น และสามารถทำงานได้ด้วยการวิเคราะห์ข้อมูลภายในสมองกลของหุ่นยนต์เอง โดยไม่ต้องอาศัยการตัดสินใจจากมนุษย์
ในปีเดียวกันนั้นเอง หุ่นยนต์ “โซเจอร์เนอร์” (Sojourner) ได้เหยียบดาวอังคารเป็นครั้งแรก โดยรับหน้าที่ในการถ่ายภาพพื้นผิว และเก็บตัวอย่างหิน เพื่อส่งข้อมูลกลับมายังโลก ในโครงการพาทไฟน์เดอร์ (Pathfinder) ที่ก่อตั้งโดย องค์การบริหารการบินและอวกาศแห่งชาติ (National Aeronautics and Space Administration: NASA)
หุ่นยนต์ได้รับการพัฒนาความสามารถทางกายภาพและความคิดอย่างต่อเนื่อง บทบาทของหุ่นยนต์ได้เปลี่ยนจากเครื่องจักรกล ที่ทำงานได้อย่างแม่นยำ ในโรงงานอุตสาหกรรม มาเป็นหุ่นยนต์ที่มีอารมณ์และความรู้สึก ดังเห็นได้จากใน พ.ศ. ๒๕๔๒ หุ่นยนต์สุนัข “ไอโบ” (Aibo) พัฒนาโดยบริษัทโซนี่ ประเทศญี่ปุ่น สร้างขึ้นให้มีลักษณะเหมือนสัตว์เลี้ยง มีความรู้สึกตอบสนอง เพื่อให้สามารถเป็นเพื่อนกับมนุษย์ได้
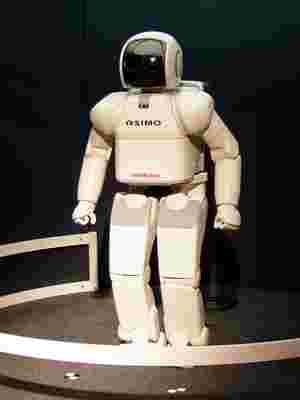
หุ่นยนต์สุนัข "ไอโบ" ใน พ.ศ. ๒๕๔๓ บริษัทฮอนด้า (Honda) ประเทศญี่ปุ่น ได้พัฒนาหุ่นยนต์เดิน ๒ ขาคล้ายมนุษย์ (humanoid) มีชื่อว่า “อะซิโม” (ASIMO) เป็นหุ่นยนต์รุ่นที่ ๑๑ โดยใช้เวลาในการค้นคว้าและวิจัยถึง ๑๔ ปี อะซิโมถูกจัดให้เป็นหุ่นยนต์ ที่สามารถทำงานรับใช้มนุษย์ได้ เป็นเพื่อนที่แสนดี และยังเป็นเพื่อนคู่คิดของมนุษย์อีกด้วย
ในระหว่าง พ.ศ. ๒๕๔๖-พ.ศ. ๒๕๔๗ สำนักพัฒนาวิจัยภายใต้กระทรวงกลาโหมสหรัฐอเมริกา (Defense Advanced Research Projects Agency: DARPA) ได้นำเสนอให้จัดการแข่งขันรถยนต์ที่สามารถเคลื่อนที่ได้เองโดยไม่มีคนขับ โดยกำหนดให้รถขับผ่านทะเลทรายเป็นระยะทาง ๑๓๑ ไมล์ ภายในรถจะติดตั้งอุปกรณ์ตรวจรู้ต่างๆ ซึ่งสามารถรับรู้ถึงสภาพถนน และสภาพการจราจร รวมถึงอุปสรรคกีดขวางต่างๆ บนถนนและรอบๆ ตัวรถได้เป็นอย่างดี โดยมีสมองกลคอมพิวเตอร์ไว้ประมวลผลจากอุปกรณ์ตรวจรู้ต่างๆ ที่ส่งเข้ามาอย่างชาญฉลาด ทำให้รถสามารถวิ่งถึงจุดหมายได้
ด้วยเหตุที่หุ่นยนต์มีอายุการใช้งานที่ยาวนาน และแข็งแกร่งกว่ามนุษย์ นักวิทยาศาสตร์จึงคาดหวังว่า เมื่อหุ่นยนต์มาอยู่ร่วมกับมนุษย์ ก็จะช่วยดูแลปกป้องมนุษย์ และเป็นสื่อกลางในการส่งผ่านความรู้ที่เกิดจากการมีปฏิสัมพันธ์กับมนุษย์ ไปสู่รุ่นลูกหลานของมนุษย์ต่อไปได้ หัวข้อก่อนหน้า หัวข้อถัดไป